Silicon Wafer Edge Grip System
Project for ME 113 at Stanford University
Completed Spring of 2013 in collaboration with students Robert Casillas, Kyle Moy and Jojo Ortiz for Applied Materials. The project goal was to design a concept mechanical system that could grip the edge of a 300mm silicon wafer (contacting at most 1mm of the edge) and rotate it while keeping the bottom side of the wafer exposed for cleaning. Of primary concern was designing systems that would minimize dust generation. Design was completed in Solidworks. Parts were designed to be fabricated out of plastic using automated processes. The majority of custom parts were manufactured using 3D Printing and laser cutting. Rotation was completed using an internally geared drive mechanism in the base, driven by a stepper motor. Clamping of the wafer was achieved using three small linear actuators attached to custom designed 3D printed clamps. Control of the stepper motor and linear actuators was done using an Arduino microcontroller. A slipring was used to connect the linear actuators to the microcontroller board.


CAD Assembly
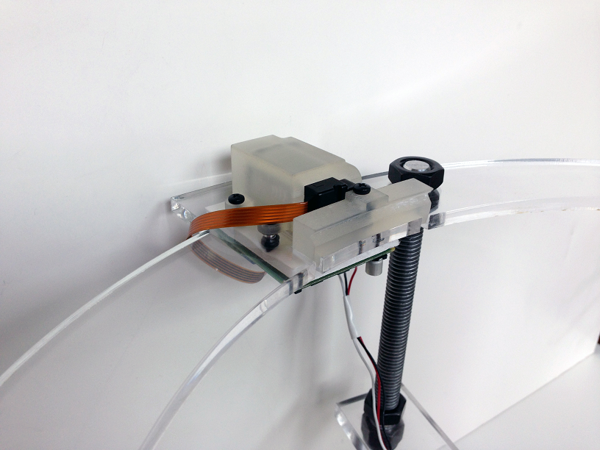
Linear Actuator with 3d-printed housing and wafer clamp

Internally geared base, partially disassembled