Autonomous Racing Robot
Project for ME 218B at Stanford University
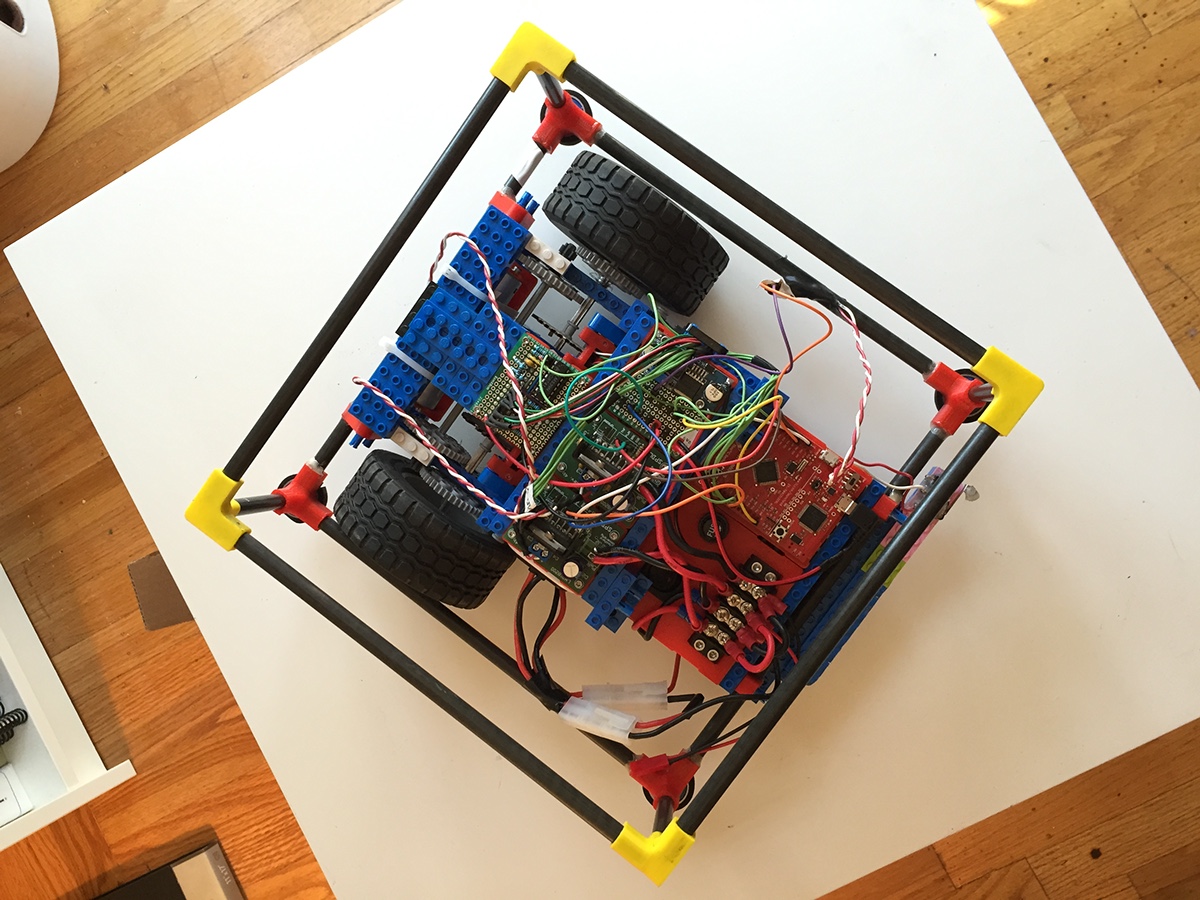
Completed Winter of 2015 in collaboration with students Kenji Bowers, Kyle Moy and Alex Lin. The project goal was to design an autonomous robot to race four laps around a course, shoot a foam ball into a bucket and traverse a see-saw obstacle. All of the hardware and software was custom designed. The chassis was made of Lego and custom 3D-printed parts which integrated with the Lego system. This allowed for rapid design iteration, and led to a robust mechanical design for competition.
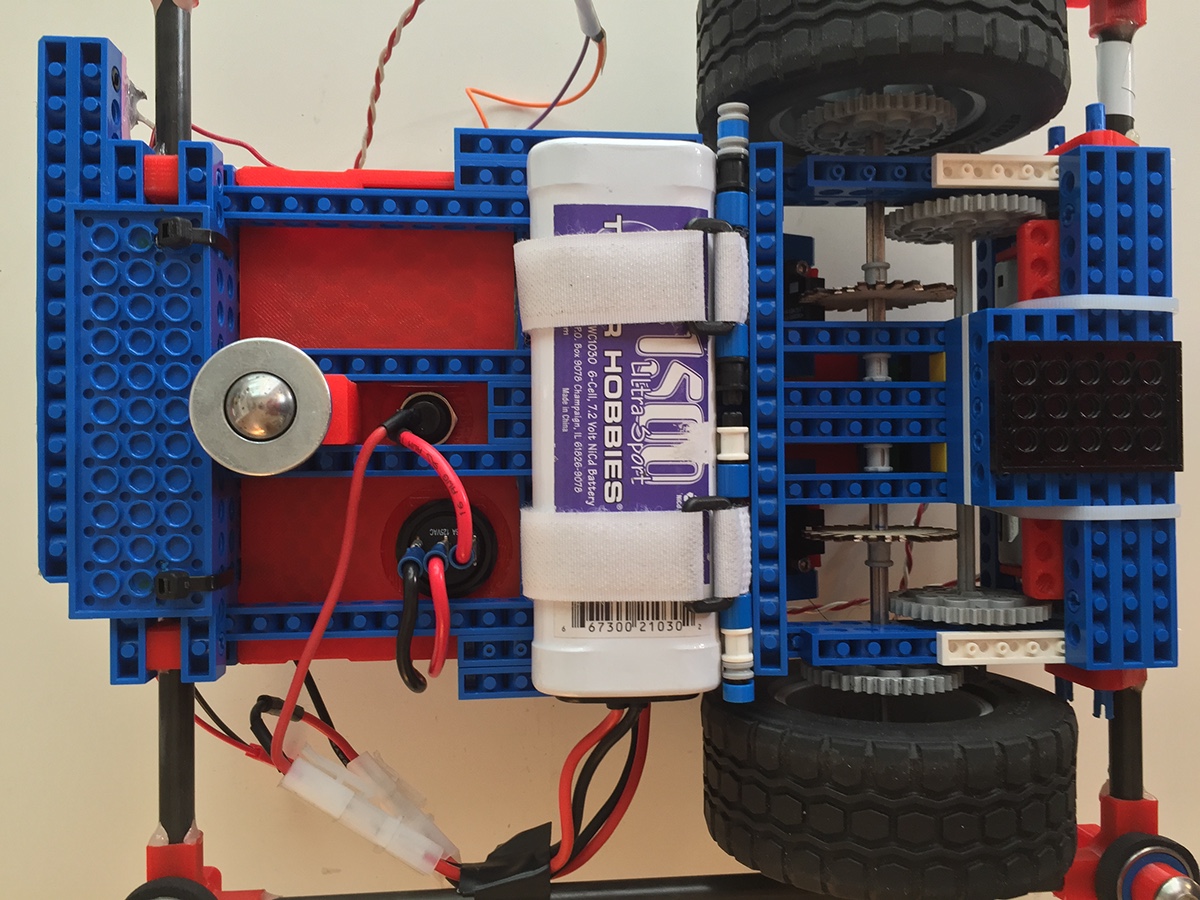
Underside view. Note the packaging of the encoders and gear train on the right side of the photo. The motors are located to the extreme right.
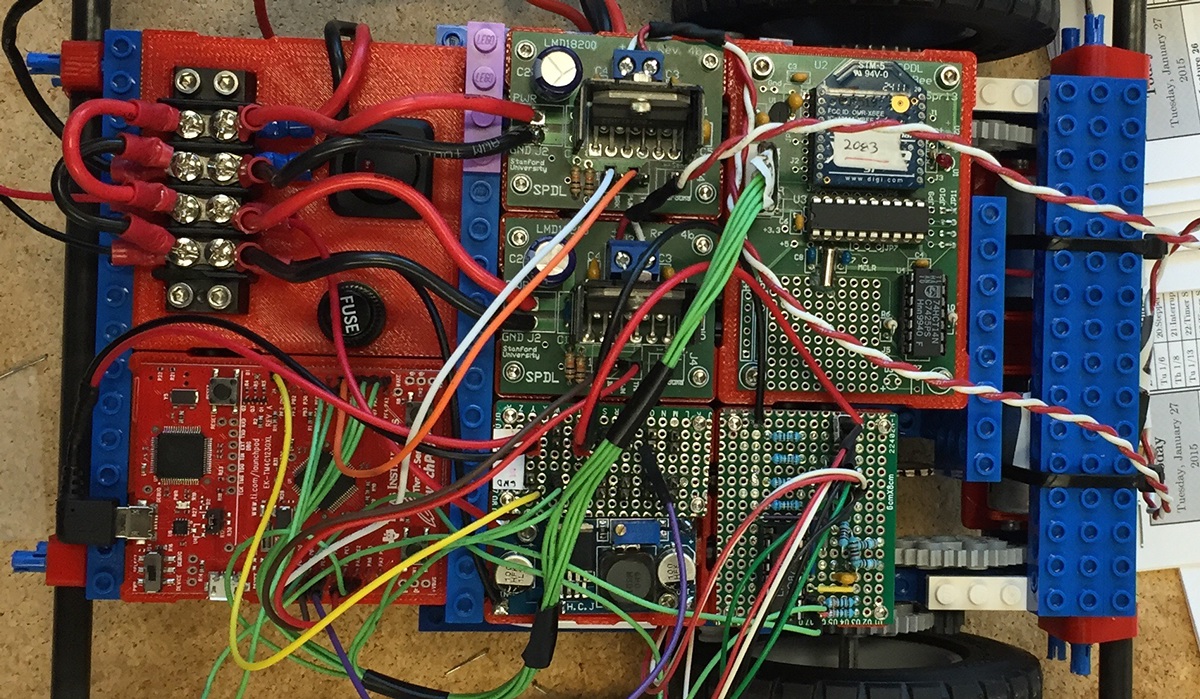
Overview of the electronics. On the top left is the power distribution board. To the immediate right of it are the two LMD18200 motor controller breakout boards. The microcontroller board is located to the bottom left. To the immediate right of it is a 5V power distribution board. On the top left is the XBee wireless communication module, and under it is the comparator circuit used for motor encoding.
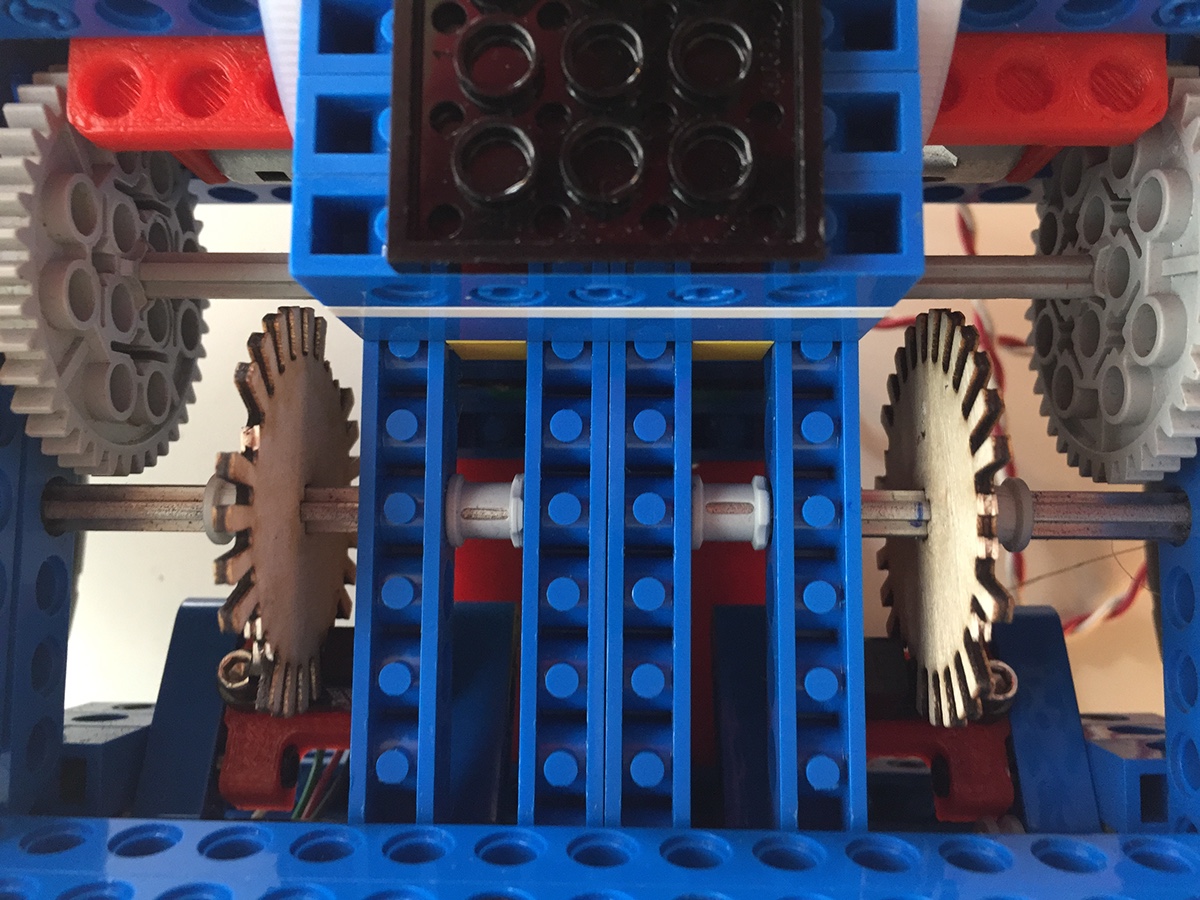
Close-up of the custom motor encoder discs. Unfortunately, the teeth were damaged.
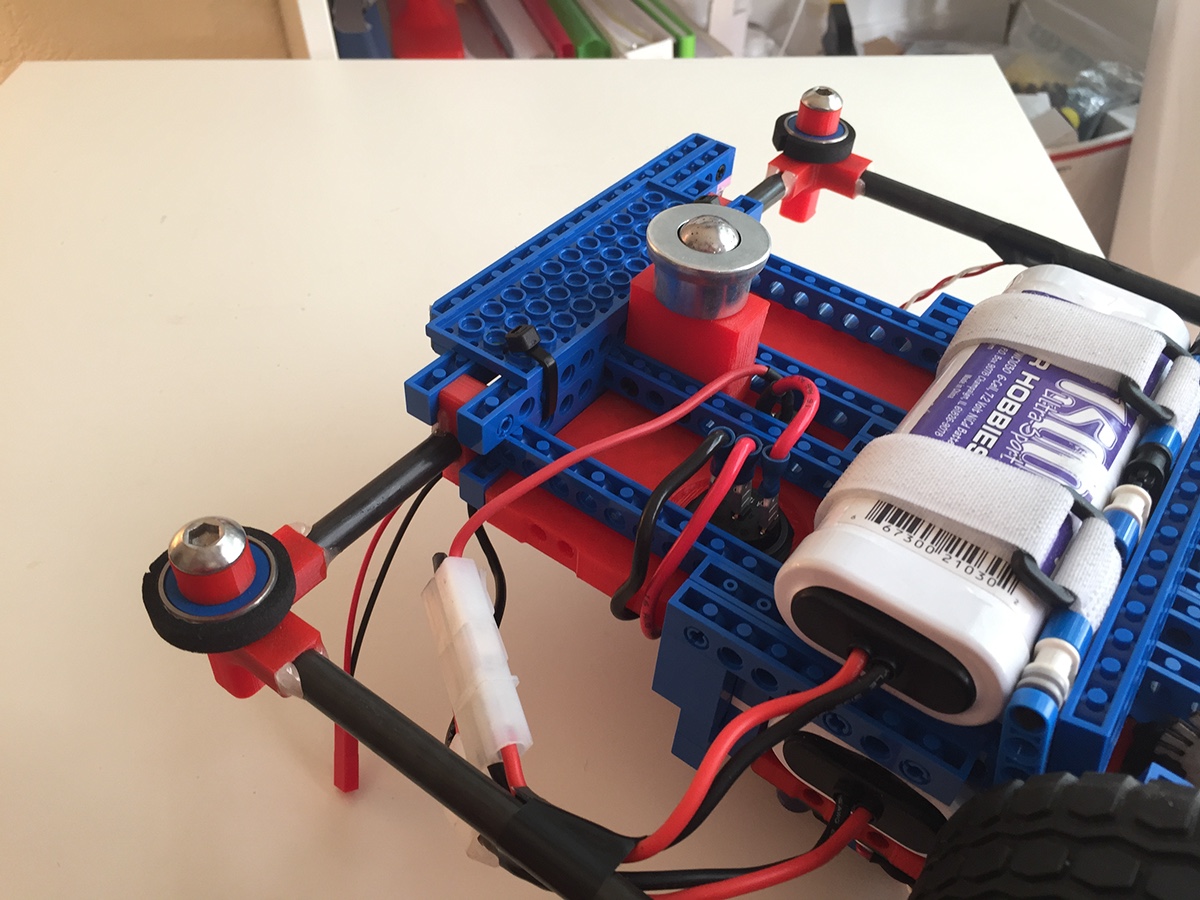
Rolling bumpers allowed for easier navigation of the playing field.