Remote Control Hovercraft
Project for ME 218C at Stanford University
Completed Spring of 2015 in collaboration with students Kenji Bowers, Hnin Ookhin and Garrett Hara. The project goal was to design a hovercraft and remote controller which could play a game requiring the popping of balloons. The remote controller was required to follow a communications spec defined by the class, so each group’s controller could control each group’s robot. The hovercraft used both a differential braking system and differential propeller control to steer, enhancing maneuverability. The controller featured accelerometer-based controls. Mechanical design was based on laser-cut Masonite in order to allow for the fastest prototyping and design iteration. Each hovercraft had a theme, ours being fine dining.
Video summary of the project
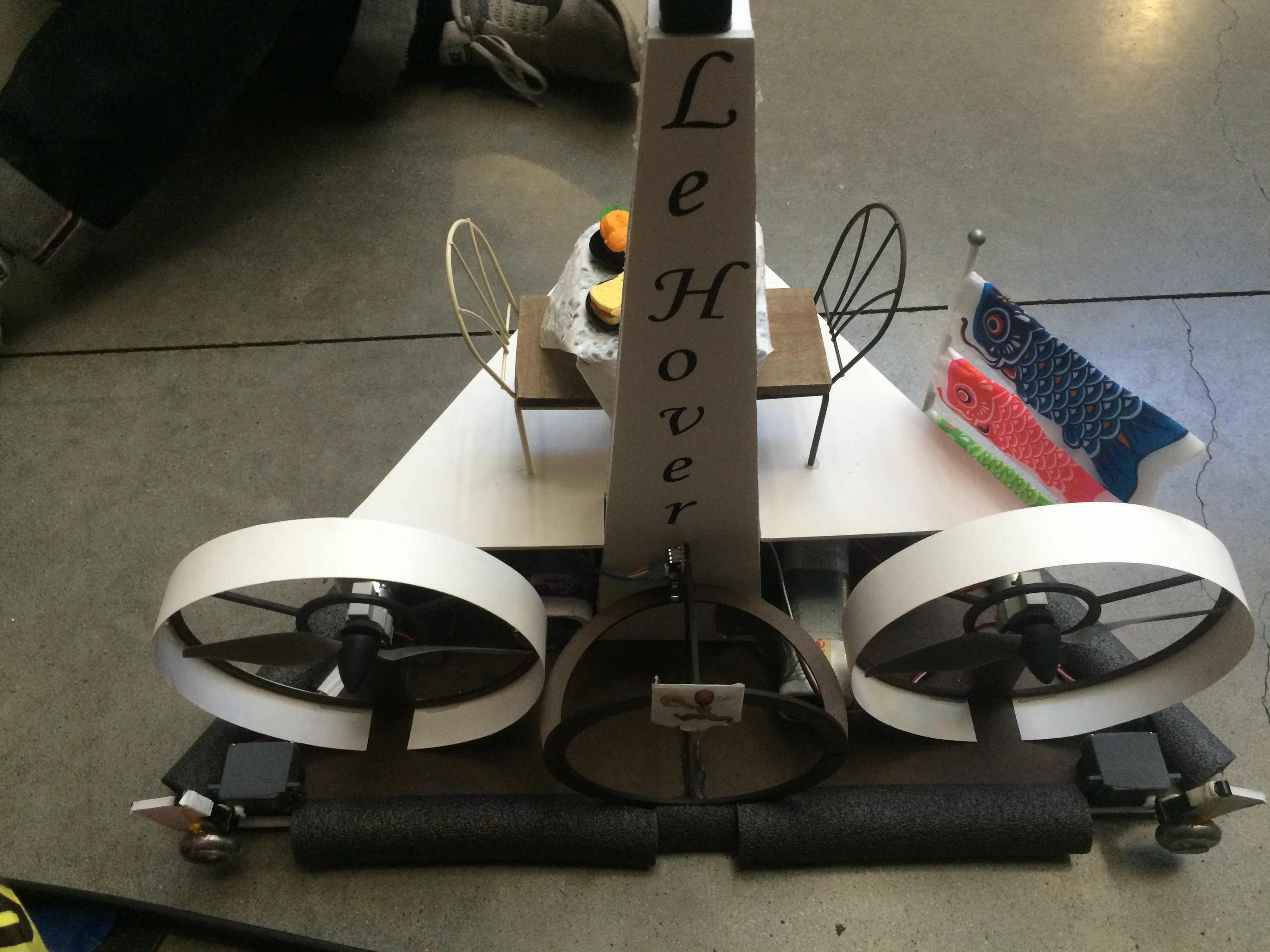

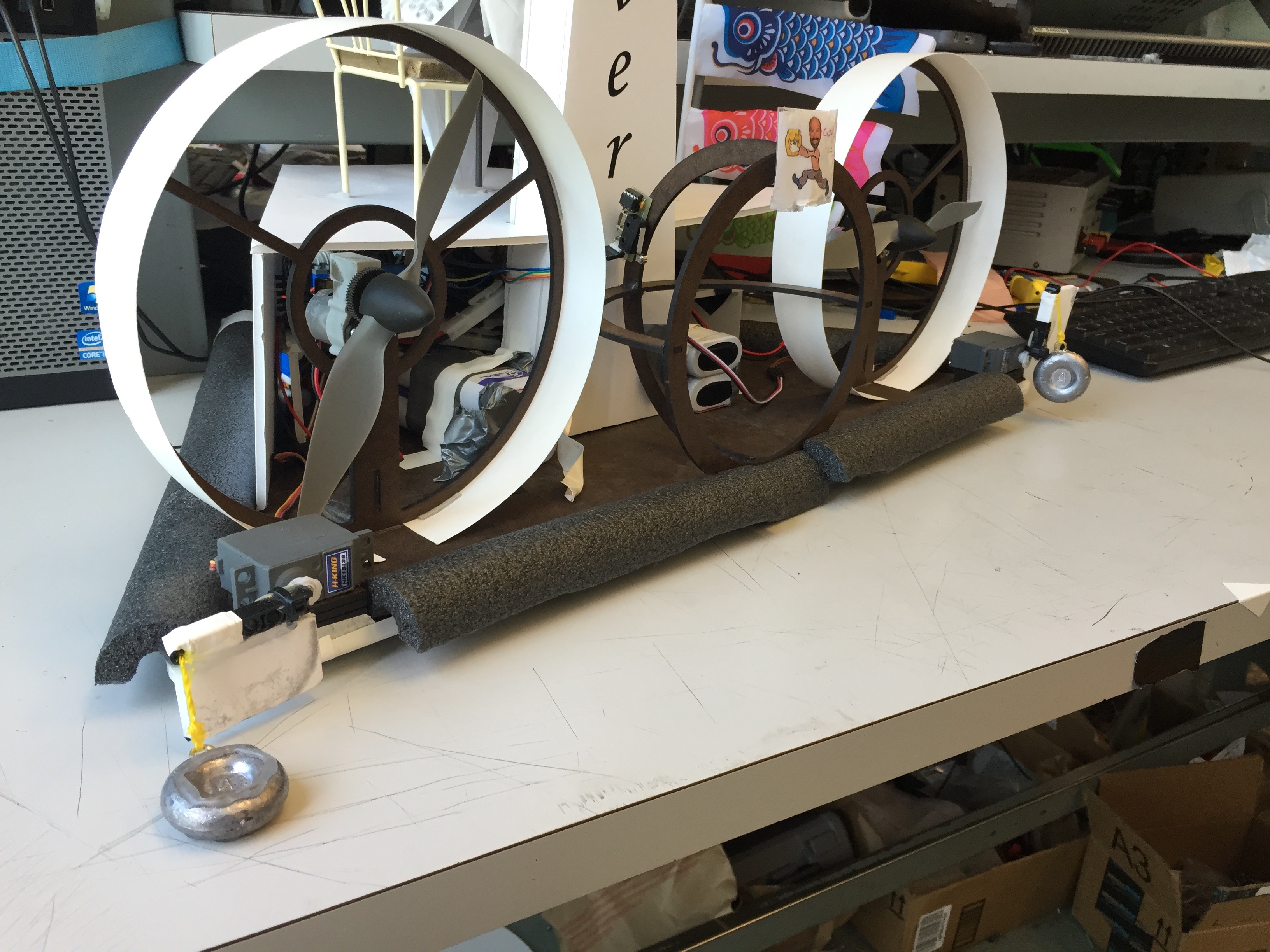
Differential braking was accomplished using fishing weights hanging from servo arms which were lowered during braking. This design was arrived at after several other designs caused loss of lift.

The balloon popper was a motor which spins a piece of wire. It was extended via a servo-controlled slider crank mechanism.
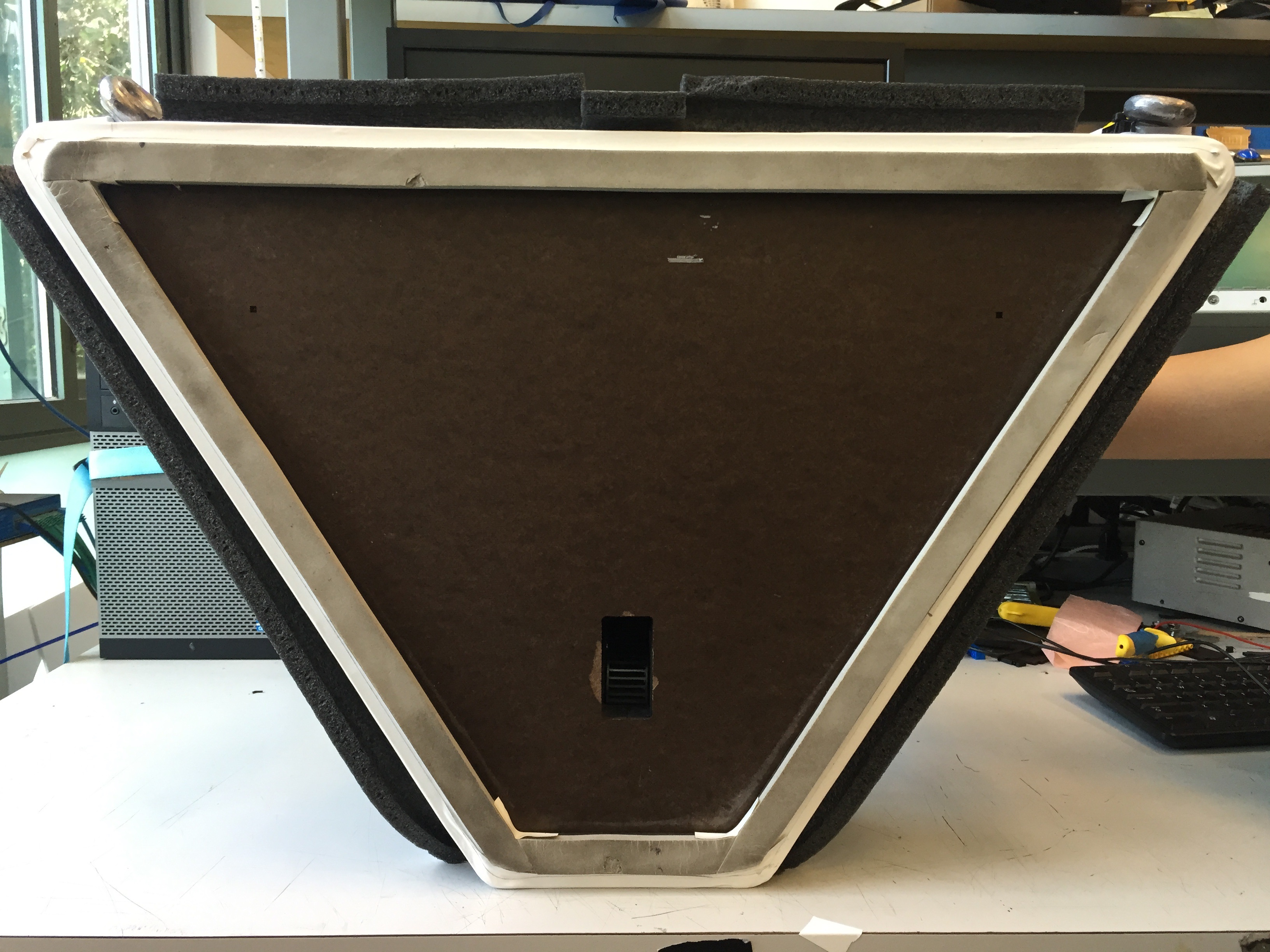
The hovercraft was designed to have a removable "skirt" to hold in the cushion of high pressure air. This modular design allowed for multiple skirts to be created, allowing for quick design iteration.

In keeping up with the fine dining theme, our controller was a frying pan.
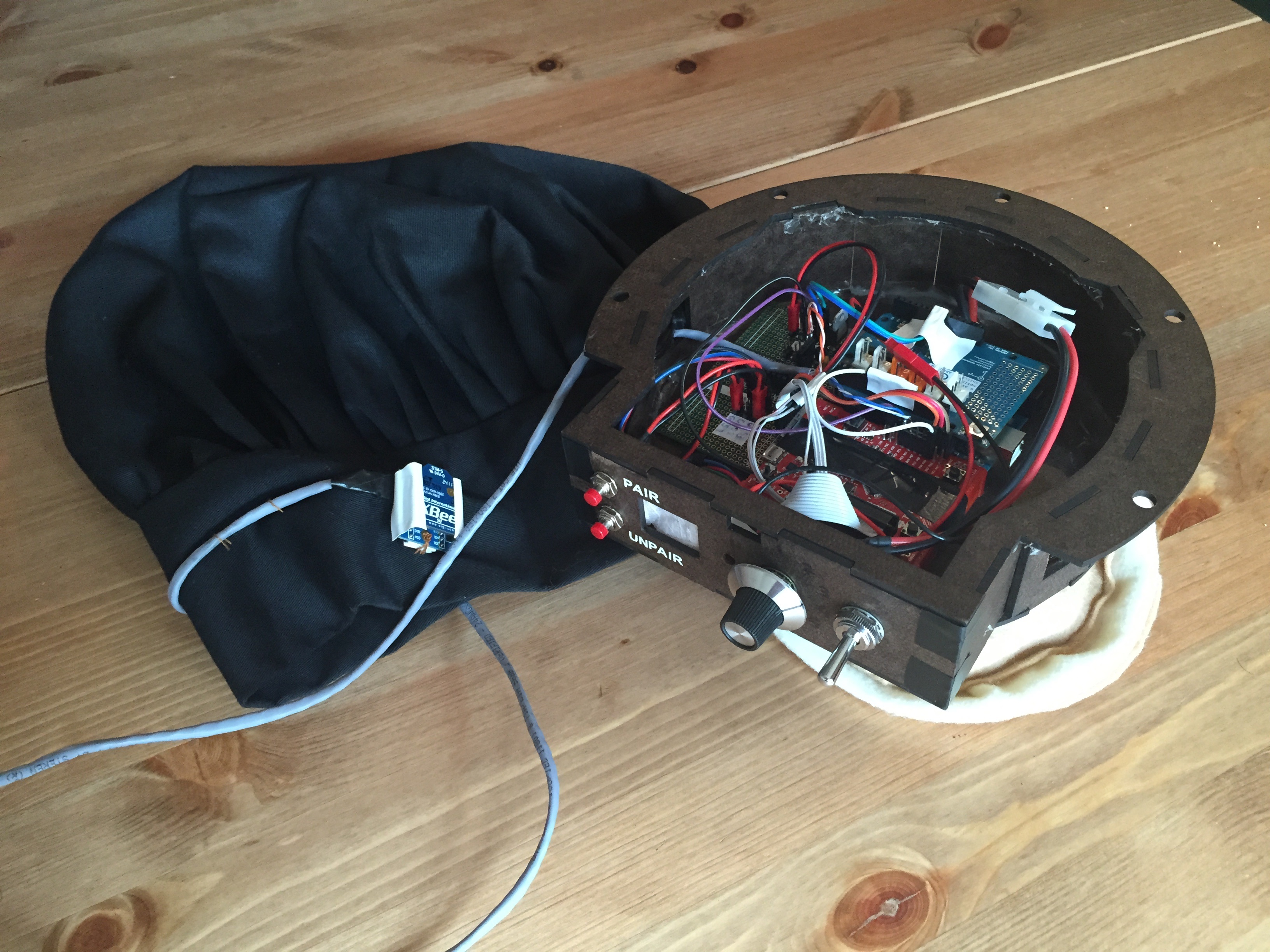
The controller featured a Bosch IMU for motion control.